
PAL Robotics’ contribution to ICRA 2021
We were very happy to be able to contribute to this year’s ICRA (The IEEE International Conference on Robotics and Automation), a robotics event with a history of over 30 years which provides an international forum for robotics researchers to present and discuss their work. PAL Robotics has been taking part in this event for a number of years, including recent events in 2019 (Montreal), 2018 (Brisbane) and 2017 (Singapore).
This year the event was the first ICRA hybrid event – a mix between virtual and live, with the live robotics event taking place in Xi’an, China. At ICRA 2021, we participated in five workshops virtually as invited speakers and presented the latest addition we are working on for the PAL Robotics family: Kangaroo robot! Read on to find out more about the robotics event.
Task-Informed Grasping: Agri-Food Manipulation
We were invited to join a workshop on Agri-Food, organised by Dr Sariah Mghames, Tommaso Pardi, Dr Fumiya Iida, Dr Mehmet Dogar, and Dr Amir Masoud Ghalamzan Esfahani. Agri-food robotics is a key element for precision agriculture (and precision food production) which has been identified as a solution to the increasing demands for agri-food products due to population growth.
This workshop focussed on topics such as agri-food manipulation, data-driven manipulation for agri-food applications, and robotic vision challenges in agri-food. Read more about the workshop topics of interest and speakers here.
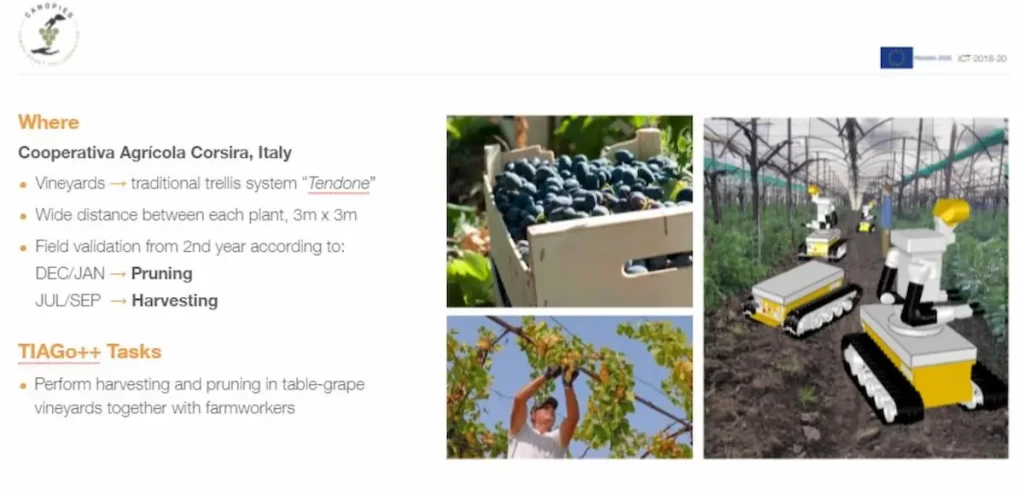
Following the acceptance of our paper, ‘Robotics and agriculture: from the labs to the fields,’ PAL Robotics’ Robotics Software Engineer, Alessandro Di Fava presented at the workshop on EU collaborative project CANOPIES that we are a partner in. CANOPIES is addressing the challenges of Human-Robot Interaction and Human-Robot Collaboration in the outdoor environment of permanent crop farming, with a project pilot planned in a vineyard which includes PAL Robotics’ TIAGo++ robot.
Bridging the Gap between Data-driven and Analytical Physics-based Grasping and Manipulation II
The workshop aimed to bring researchers with different views on grasping and manipulation together – including those from an analytical modeling-based background and those from a data-driven background. This workshop was organised by Dr Yasemin Bekiroglu, Dr Naresh Marturi, Prof Marc Deisenroth, Dr Yiannis Karayiannidis, Dr Miao Li, Prof Florian Pokorny, and Prof Robert Platt. Find out more about the workshop and the presentations here.
In this workshop, PAL Robotics’ Robotics Engineer and PhD student, Luca Lach joined to talk about ‘Robust grasping with mobile robots using tactile sensors,’ focussing on the EU project NeuTouch, which aims to improve artificial tactile systems, by training researchers that study how human and animal tactile systems work, and developing new technology based on the same principles that provides a real sense of touch.
Emerging Paradigms for Robotic Manipulation: from the Lab to the Productive World
We were delighted to be part of this discussion on robotic manipulation, organised by Dr Virginia Ruiz Garate, Maria Pozzi, and Dr Maximo Roa, where the conversation addressed topics such as technology transfer from research labs to industry, and AI applied to robotic grasping and manipulation. Read more about this session here.
At this workshop, PAL Robotics’ CEO, Francesco Ferro talked about ‘Robotics’ manipulation: perspective and approach from industry.’ This included some of our experiences in European research projects in the areas of Agrifood, Industry, and Healthcare through projects SIMBIOTS and Co4Robots (industry), SANDRo, and ALMI (ambient assisted living and healthcare).
PAL Robotics’ presentation also included robotics competitions with our mobile manipulator robot, TIAGo which has taken part in a number of robotics competitions and is the robot of choice for many research institutions around the world.
Dinosaurs vs. Unicorns at the Time of the Covid-19 Pandemic
The discussion organised by Prof Paolo Dario, focussed on ideas for bringing businesses back to their “start-ups” years when they were ready to experiment and try new things, with contributors to the workshop from different fields including robotics, automation, AI, economy, finance, and industry.
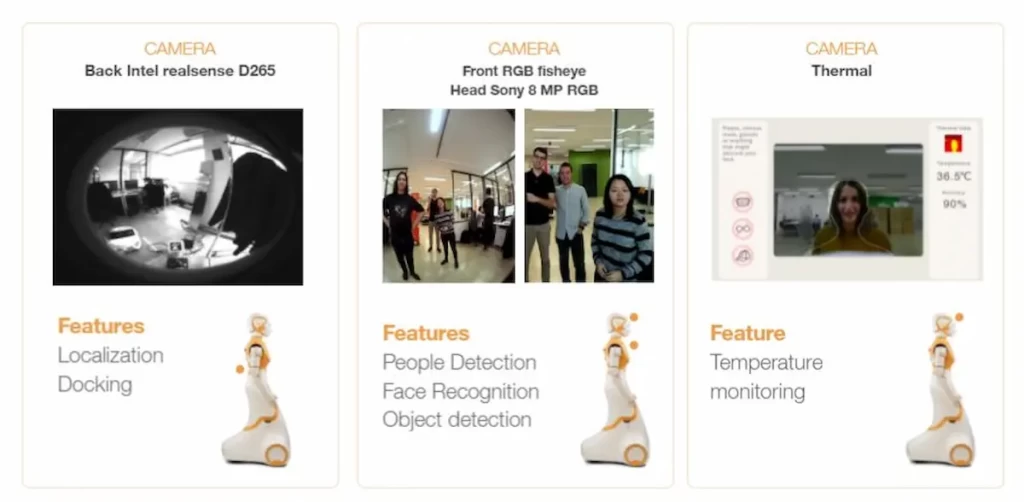
PAL Robotics’ Francesco Ferro joined this workshop to present ‘Delivering innovation during the COVID-19 pandemic and beyond’ including collaborations to develop new and adapted solutions within tight timelines. Examples of collaborations discussed were FAST AV – the TIAGo Base solution adapted to work in hospitals, SHAPES – ARI robot being piloted as a home robot assistant with added features needed during the pandemic, such as temperature monitoring, and TIAGo Disinfection – TIAGo Base with a UV-C light integration by project partners to form a disinfection robot.
Full-Day Workshop on Legged Robots including Kangaroo robot
Close to the end of ICRA, organisers Prof Krzysztof Walas, Prof Dimitrios Kanoulas, Dr Shamel Fahmi, Dr Marko Bjelonic, Dr Navinda Kottege, and Prof Aaron Ames hosted a full-day workshop on ‘Legged Robots.’ The session was launched by a welcome from Krzysztof Walas and Dimitrios Kanoulas.
As a background to the workshop, most difficult-to-access environments share common features such as rough and unstructured terrain. Together with issues such as low visibility, these environments are dangerous for humans to access, and in these environments, legged robots have inherent advantages. Despite these capabilities, there remain challenges in making these walking robots suitable for real-world use
cases. This workshop investigated the technological developments missing for the widespread deployment of legged robots. Find out more about this session here.
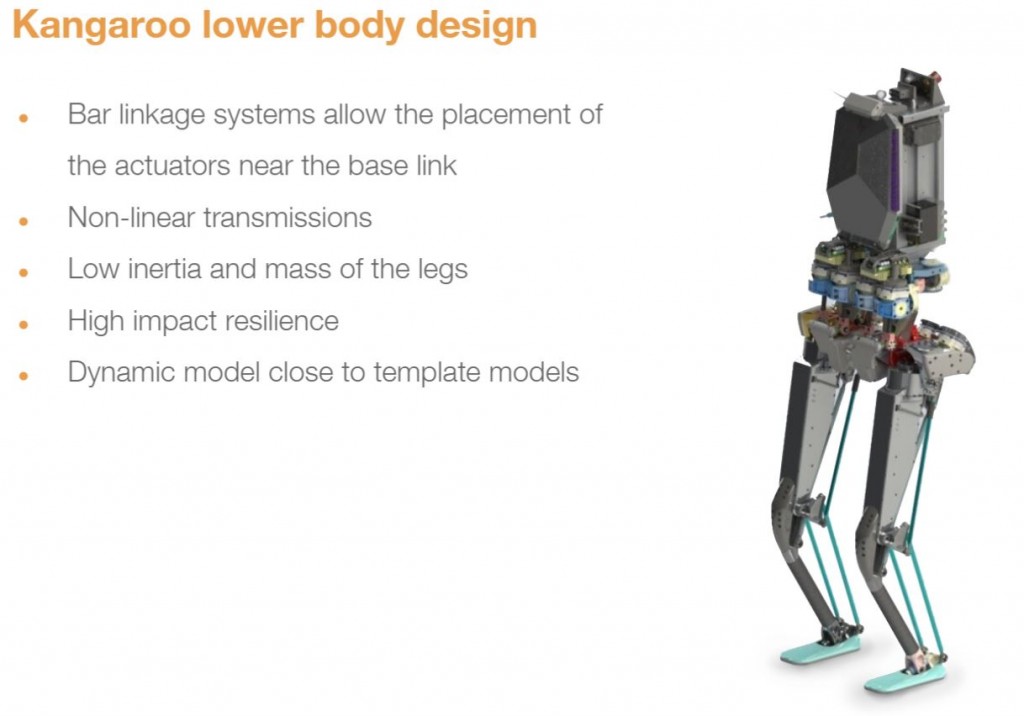
PAL Robotics’ Luca Marchionni, CTO, presented PAL Robotics’ latest development project here, ‘Making of a jumping robot,’ including the inspiration behind this project to create ‘Kangaroo robot’, pushing the limits of ‘normal’ robots, building leg architecture for a jumping robot, and the lower body design of Kangaroo robot. He also talked about jumping tests with the Kangaroo robot, and the Reactive MPC walking controller in simulation. Work on the development of the Kangaroo jumping robot is ongoing, so stay tuned for more news!
PAL Robotics’ robots at ICRA 2021
As well as the Kangaroo jumping robot, at ICRA 2021, we presented and discussed our robots including:
- ARI – our social humanoid robot ARI designed for all types of Human-Robot interactions including at events, as a receptionist, in education, and in public spaces.
- REEM-C – a humanoid legged robot suitable for research in areas such as navigation, HRI, vision, or AI and used in various research institutions.
- TALOS– one of the most advanced humanoid research robots of its kind and used in research institutions worldwide.
- TIAGo – the mobile manipulator robot which is the platform of choice for many universities; suitable for perception, manipulation, navigation, and HRI.
- TIAGo Base – our indoor delivery robot for industry and business, which helps companies to improve efficiencies.
- TIAGo Disinfection – an integration on top of TIAGo Base robot of UV-C disinfection lights, to form a disinfection robot for indoor public spaces.
- StockBot – our inventory tracking and data collection robot for retail, which helps to track inventories and efficiently manage store operations.
We would like to thank the organisers and workshop hosts of ICRA 2021 once again for what was a great robotics event! We look forward to seeing you at the live event in 2022! To find out more about PAL Robotics, visiT our blog on technology and robots to find all our latest news and updates.
Collaborate with us?
If you’re searching for project partners don’t hesitate to ask us more – we are passionate about the value of collaborative projects for sharing expertise and for innovation and we are always looking for new opportunities to collaborate! This may be within Horizon Europe, through other frameworks, or simply with other organisations. Contact us today to find out more.