
Humanoids 2020: the latest news from the conference
Last week we participated in The IEEE-RAS International Conference on Humanoid Robots (Humanoids) as Gold Sponsors. We took part in the workshops ‘Towards physical-social human-robot interaction,’ and ‘TALOS: Status & Progress’, as invited speakers, as well as offering a Virtual Tour of our legged robots including our latest projects, SOLO12 & Kangaroo.
The IEEE-RAS International Conference on Humanoid Robots is the internationally recognized prime event of the humanoid robotics community. Established in 2000 and held annually, the Humanoids Conference is a forum for researchers working in the area of humanoid robots including mechatronics, control, perception, planning, learning, human-robot interaction, biomechanics, artificial intelligence, cognition, and neuroscience.
Although this year’s event took place virtually, PAL Robotics has previously taken part in Humanoids Conferences around the world, including in Toronto, Birmingham and Beijing in recent years.
PAL Robotics’ virtual tour of legged robots
At the event, we offered a Virtual Tour of all of our legged robots featuring our Humanoids Team: Sai Kishor, Adrià Roig, and Narcis Miguel. During the tour the team presented the newest additions to the PAL Robotics family, SOLO12 quadruped robot, which we are now making available for purchase (either fully assembled or in a complete pack for teams to put together), and Kangaroo jumping robot, our latest project for which we have so far developed the lower body with the ability to jump, as well as TALOS, REEM-C, and If you missed it, look out for news of other upcoming live sessions on our website.
Physical-social HRI and more: Workshops at Humanoids 2020
The workshops at this year’s Humanoids event included the following:
Towards physical-social human-robot interaction
The objectives of this workshop were to bring together the pHRI and sHRI research communities, and generate discussions, for instance on the social and ethical implications of physical contact in HRI, as well as the use of non-verbal communication.
Our CEO, Francesco Ferro participated in this workshop to talk about ‘Developments in HRI to advance humanoid robots’ including collaborative projects we take part in, SHAPES and SPRING where our humanoid social robot ARI is assisting in healthcare and at home, and CANOPIES where our humanoid robot TIAGo is being adapted for use in vineyards for agrifood.
The workshop was organised by Prof Katja Mombaur, Dr Marie Charbonneau, and Dr Francisco Andrade Chavez of the University of Waterloo, Canada. Take a look at more information on this workshop here.
TALOS: Status & Progress
This workshop facilitated the exchange of information about control approaches for humanoid robots, with torque-controlled robots such as the TALOS platform in mind. This workshop included applications being developed on TALOS in the community, for example, we saw that the robot is able to jump for the first time. Speakers who work on other humanoid platforms were also invited to share their perspectives.
We joined the workshop as invited speakers, with our Robotics Software Engineer, Adrià Roig presenting software stack upgrades and progress on whole-body control for robot TALOS, Walking in torque control, software updates, and the new applications that are being developed in TALOS.
Olivier Stasse of CNRS, and Alexander Werner of University of Waterloo were the workshop hosts. All the presentations from within the session are here.
TALOS software stack upgrades and progress on Whole-Body Control (WBC)
We are constantly working with our advanced humanoid biped platform, TALOS, to develop the robot’s capabilities, including new dynamic motions and progress on Whole-Body Control (WBC) for example. The latest software updates on TALOS include:
- Walking in Torque Control
- Grasping/Manipulation in Torque Control
- ROS Melodic
- 2kHz RT Control
- Improved robustness and usage for customers
- Extended Documentation and Tutorials
- Automatic Torque Offset Calibration
TALOS: Locomotion in torque control
The robot walks in inclined and uneven surfaces using the Whole Body Inverse Dynamics Controller by PAL Robotics. The contacts and references of the WBC are optimised by a centroidal trajectory optimization method. Even though the steps may not be even, the robot is able to adapt to the environment and not the other way around.

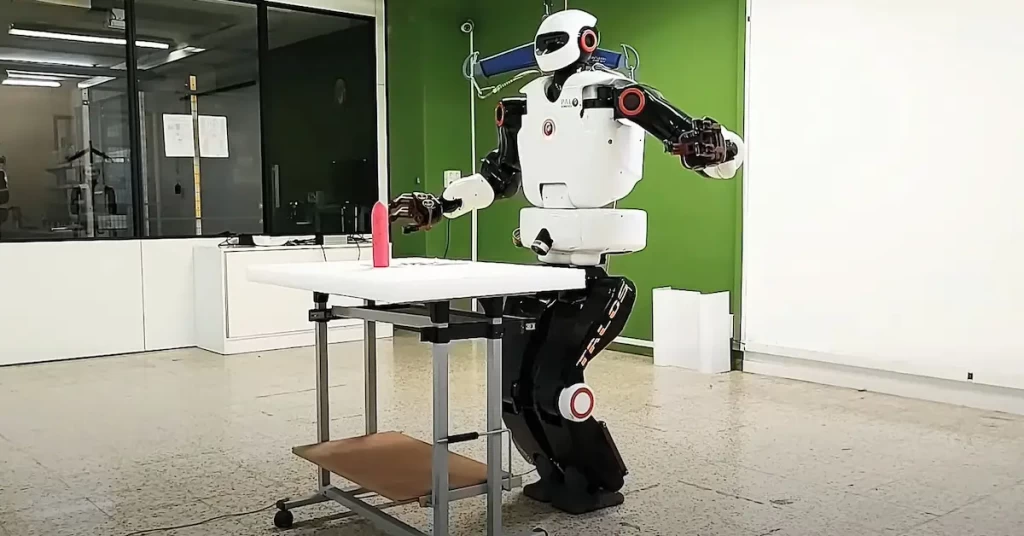
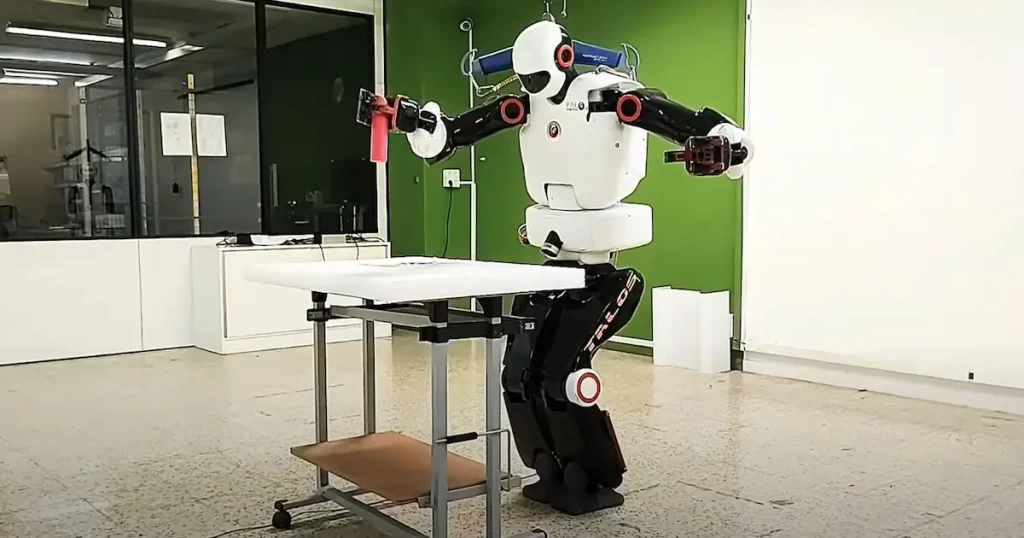
TALOS: Manipulation
The WBC Inverse Dynamics by PAL Robotics is not used only for locomotion. In fact, it’s possible to perform manipulation tasks with the same controller, such as the robot grasping an object. In experiments, we can see the robot being disrupted by an end-user when grasping an object. Moreover, the modularity of this controller allows the robot to change behaviour online allowing it to pass from manipulation to locomotion without the need to stop controllers in between.
Read here the interview with Enrico M. Hoffman about the real complex applications for TALOS.

TALOS: Perception and planning
Some of our work on TALOS has also included the perception and planning of contacts on unstructured terrain. This allows it to detect the valid surfaces and valid contact locations, before sending them to the centroidal trajectory optimization algorithm. TALOS detects and generates valid footsteps by segmenting the different planes using PCL and generating a grid map. Read more about this in our blog ‘Humanoid robot navigating autonomously over rough terrain; spotlight on TALOS’
The state-of-the-art on TALOS through project Memmo
EU project Memmo aims to develop memory of motion – a unified approach to motion generation for complex robots with arms and legs. This type of technology could change the motion capabilities of robots enabling broader use in different types of industrial and service scenarios, in particular, in environments that are dynamic and unpredictable. However, for complex robots with arms and legs with current computational capabilities and numerical algorithms this is not currently realistically possible in real-time. Project Memmo aims to solve these challenges.
The project includes a number of partners – LAAS CNRS(about LAAS and TALOS), IDIAP, the University of Edinburgh, Max Planck Institute, Oxford Robotics Institute, University of Trento, PAL Robotics, Airbus, Wandercraft, APAJH, and Costain. TALOS is one of the robots that participates in this project – including in use cases for the aeronautic industry.
Read about the University of Edinburgh and their work with TALOS and also about TALOS at the University of Waterloo.
In this project, PAL Robotics’ TALOS robot is being used as a development platform for testing algorithms, such as: joint Torque Control, Whole Body Inverse Dynamics, Model Predictive Control and multi-contact motion planning.
The latest work on TALOS as part of project Memmo, has included Model Predictive Control (MPC) with full state feedback experiments and memory of motion as warm start up – where thanks to the warm start the MPC is able to find the optimal solution on time. For instance, TALOS has to track an object while at the same time avoiding collisions with the environment.
Discover how PAL Robotics promotes innovations through the EU Projects.
In addition to the Memmo project, PAL Robotics works on many EU projects covering areas such as smart cities, factories of the future, and Artificial Intelligence (AI). If you’re searching for project partners don’t hesitate to ask us more – we are passionate about the value of collaborative projects for sharing expertise and for innovation! To find out more about EU projects or request information, visit PAL Robotics’ collaborative projects webpage or contact us today to find out more.
We would like to thank the organisers of Humanoids 2020 for what was once again a great event, in particular to General Chairs of the organising committee, Prof. Gordon Cheng of the Technical University of Munich, and Dr. Christian Ott of the German Aerospace Center. We look forward to joining Humanoids again in 2022!
To read more of our articles, don’t miss our blog on our work and research in robotics!