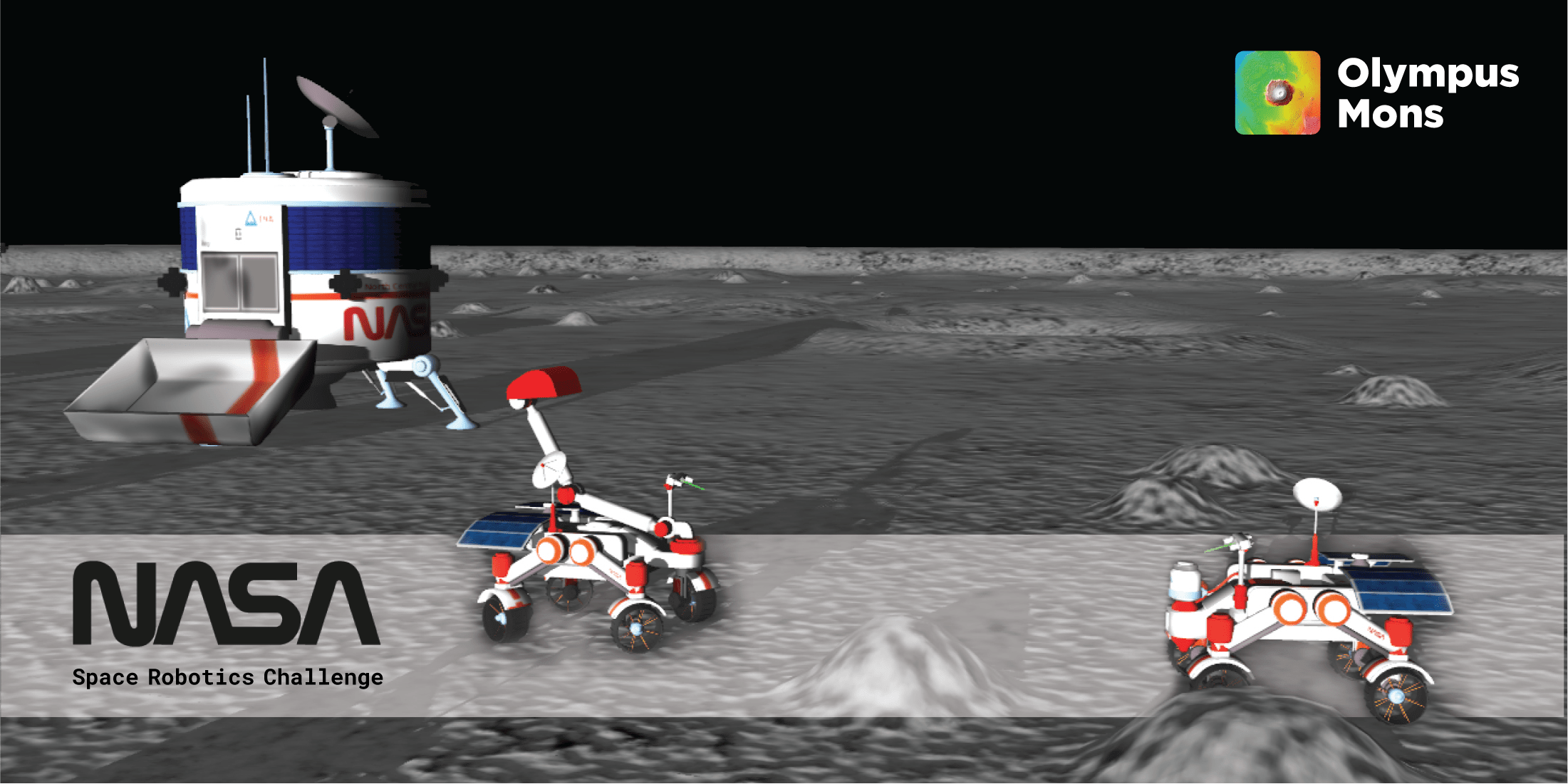
PAL Robotics’ team triumphs in NASA Space Robotics Challenge
A group of PAL Robotics employees that formed the Olympus Mons team recently won first place in the NASA Space Robotics Challenge (phase 2). NASA’s Space Robotics Challenge is a virtual competition to advance robotic software and autonomous capabilities for space exploration missions on the surface of extraterrestrial objects, such as distant planets or moons.
As NASA aims to support further missions to explore the solar system, the need to supply oxygen, water, food and other materials such as protective clothing becomes greater. It will also become essential to develop technologies and mission architectures that utilize local resources, such as those found in lunar regolith, to provide supplies needed for human exploration.
The aim of the NASA Space Robotics Challenge was to find solutions to allow a multi-robot team to complete tasks autonomously for a lunar in-situ resource utilization (ISRU) mission. For this, the competition required competitors to develop software for a virtual robotic team to operate autonomously to achieve these tasks successfully.
The competition took place within a software simulation environment. The challenge required participants to develop fully autonomous operations, navigation, and decision-making capabilities to be tested on planetary robotic systems within a simulation environment.
The team of current and former PAL Robotics employees that won first place in the challenge as team ‘Olympus Mons’ were Alessandro Di Fava, Víctor López, Sai Kishor Kothakota, David Fernández López, Pierre Fernbach (at PAL Robotics’ French partner research partner organisation TOWARD), Luca Marchionni, Adrià Roig Moreno, and Narcís Miguel Baños. Team Olympus Mons worked hard on this challenge, launched in August 2019, in their free time.
Robots for scouting, excavating and hauling on a virtual moon
We caught up with Víctor López, Robotics Software Engineer at PAL Robotics, who was part of the Olympus Mons team to ask more about the team’s experiences, how they approached the competition, and the challenges they faced.
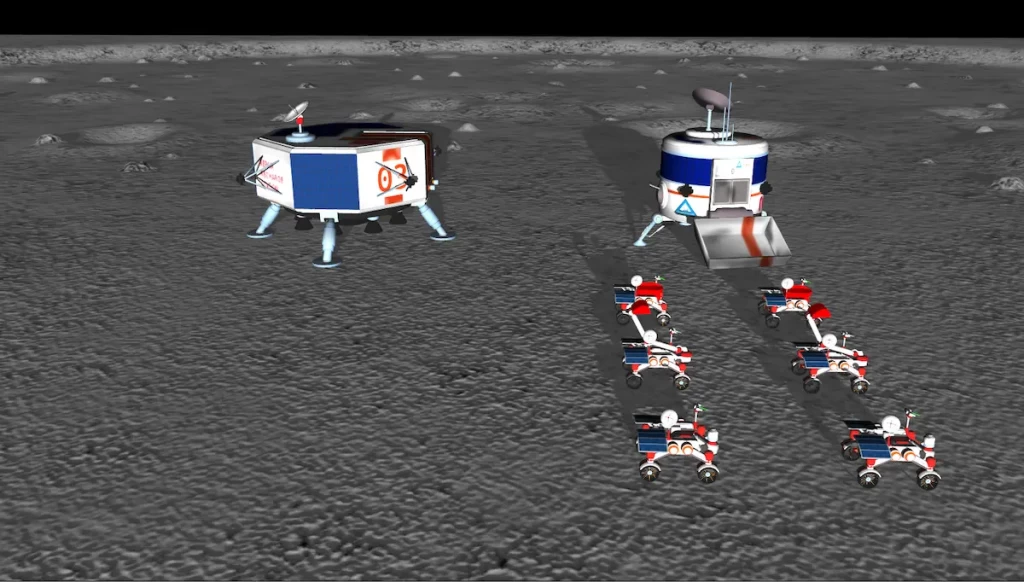
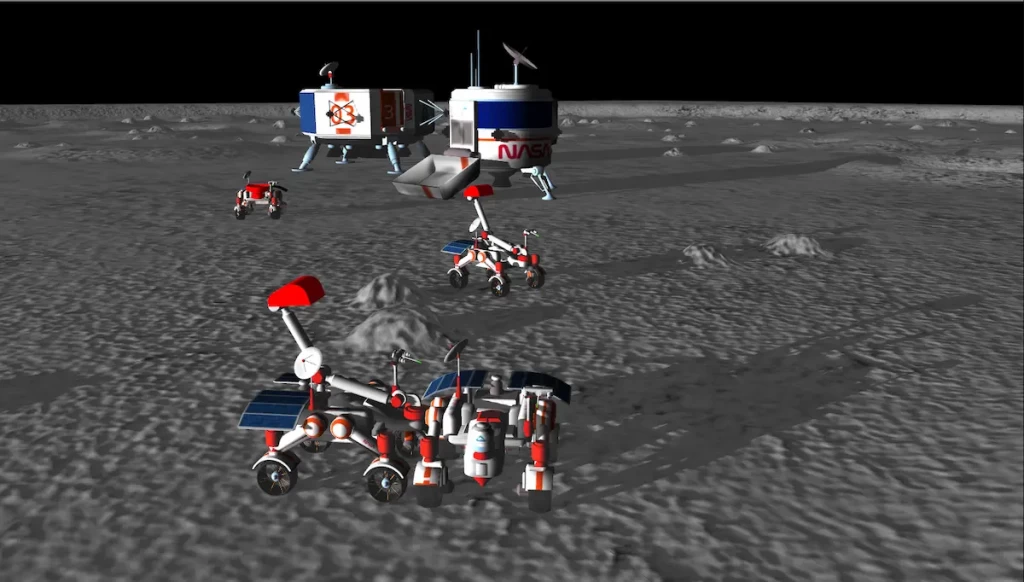
Victor told us, “in the challenge we had to choose six robots out of three types of robots. The types of robots included – scouts, excavators, and haulers. Scouts detected a volatile – for example ice, water, or ammonia – excavators would dig them from the ground and haulers would then take volatiles to a processing plant somewhere on the moon. We had two hours to find, extract and transport as many volatiles as possible to the processing plant – this was the competition mission.”
Victor continued, “the challenge was that the robots had to be fully autonomous, and the software had to work automatically. The rovers also had fewer and more limited sensors than the robots we usually work with at PAL Robotics.”
Developing an overall solution to navigate across the moon
In terms of developing the overall solution, Victor told us, “we developed a solution that could handle any rover swarm composition, with a variety of different types of robots, since we started we didn’t know which combination of robots would be optimal. The goal was to navigate across the moon as quickly and safely as possible, without losing track of where the robots were, which was a challenge in itself, as the moon doesn’t have many distinctive features – for example the craters all look similar.”
“Here we fused Visual Odometry, Wheel Odometry and IMU data to keep a reliable odometry on each robot. Also, to cut down error accumulation over time, when the hauler went to a known location to drop volatiles, it would correct its accumulated position error and the accumulated error of the rovers it encountered. With this method, we were able to keep the positioning error of the robots below 1 meter indefinitely. However, digging and dropping volatiles required a precision higher than 10cm. We used the rover cameras to identify other rovers and perform a docking manoeuvre before digging and dropping.”
Victor went on to explain, “another challenge we faced here as a team was battery management – as we are used to robots with an autonomy of many hours. The robots could use their battery very quickly in this challenge. To address this we tried to identify the critical moments where we needed the full power of the robot and for the rest of the time, for non-critical parts of the work we used power save mode and solar charging to be able to run them continuously without running out of battery and without having to recharge in a central a location.”
Victor told us about some of the Olympus Mons team roles in the challenge, these included:
- As navigating through the lunar surface was challenging, we had to develop new ways of detecting obstacles with a low frame rate laser and stereo cameras, that would allow us to traverse the moon at maximum speed safely.
- Once a volatile was found, and the rovers were in position, we had to dig them from the ground and drop them on the hauler. This was a challenge on its own, as it required taking into account the different 3D orientations of each rover.
- Finally, we worked very hard to optimize all the steps of the process, so we did every task as fast as possible, to have no idle robots, at all times the rovers would be doing some critical task, navigating to their next task, or charging batteries, so we could reach the maximum team efficiency.
The importance of challenges to the future of space robotics
In terms of why the challenge is important to space robotics, Victor told us, “this challenge has given NASA the opportunity to get ideas from many different teams across the world with many different backgrounds, they can all bring different ideas and perspectives to the challenge. We would be absolutely delighted if our work here as the Olympus Mons team is an inspiration to the future of space robotics.” Victor added,“in addition, for our team, participating in the challenge forced has enabled us to face very complex problems and come up with creative solutions for them, which can only be an asset to us in our daily work in robotics.”
We would like to extend our congratulations to all of the finalists of the NASA Space Robotics Challenge – phase 2, you can find out about them here.
The previous phase of the challenge – phase 1 concluded in June 2017 and focused on NASA’s R5 humanoid robot operating in a virtual Mars environment. In this round of the challenge, competitors were given the task of advancing the capabilities of humanoid robot dexterity to better enable robots to work alongside, and independent of, astronauts. For more information, check out the previous article on PAL Robotics at the NASA Space Robotics Challenge.
The Space Center Houston worked with NASA to design and deliver the competition. Space Center Houston is a non-profit and the space museum is the visitor center for NASA’s Johnson Space Center in Houston, Texas. Centennial Challenges, part of the prizes and challenges portfolio within NASA’s Space Technology Mission Directorate, offers prizes to generate revolutionary research and technology solutions to problems of interest to NASA. NASA – The National Aeronautics and Space Administration is America’s civil space program and the global leader in space exploration.
PAL Robotics started in 2004, when a small group of engineers built the first fully autonomous humanoid biped robot in Europe. With over 17 years of experience in R&D, today we are known for our humanoid and mobile robots used for research, logistics, retail and social applications for companies, institutions, and labs. Our mission is to enhance people’s quality of life through service robotics and automation technologies. To read more about team projects at PAL Robotics and our robots, visit our blog. To ask any questions don’t hesitate to check out our contact page to reach us any moment.