
The interchangeable grippers for TIAGo robot
Being able to perform different types of robotics manipulation tasks requires different robotic end effectors. To help us in our daily lives, robots of the future need to be able to detect and pick up all different types of objects – from heavy solid objects in industry to light, delicate and even fragile objects, such as clothing, food, or ornaments in the home. Mobile manipulation is a complex task that involves a variety of robotics skills working together, including perception, navigation, HRI (Human-Robot Interaction), and of course the actual manipulation of objects itself.
To increase the capabilities of mobile manipulator robots for research as well as for real-life use cases, developing highly advanced skills in mobile manipulation is essential. Today’s research in mobile manipulation tends to focus on all of these elements working hand-in-hand. Choosing the right end effector also has a strong impact on bringing success to a given use case in robotics. When determining which type of End-of-Arm Tooling to choose, factors for this choice include the payload (weight the end effector holds), speeds of operation, size, and space constraints.
Our TIAGo mobile manipulator has interchangeable end effectors, making the robot flexible in adapting to different research needs and use cases. Examples of these are the TIAGo Parallel Gripper and the TIAGo 5-fingered Hand. In addition, we have recently added new end effectors to increase capabilities further for performing different types of tasks, working together with the global collaborative robotics end effector provider, Robotiq. The newest end effectors available for TIAGo are:
- Robotiq Gripper 2F-140
- Robotiq Gripper 2F-85
We often work with customers to develop adaptations to our products following their requests, and this project is no exception. We have worked to make the latest grippers available on our TIAGo robot, after a request from Dr Georgia Chalvatzaki. Georgia is the research group leader of the iRosa Lab at the University of Darmstadt, you can read more about her work in our recent interview divided in part 1 and part 2.
Increasing research possibilities using different end effectors
All of the end effectors available with the TIAGo robot (Parallel Gripper, 5-fingered Hand, Gripper 2F-140, and Gripper 2F-85) are easily interchanged by the user for the robot to perform different manipulation tasks in a variety of fields of application.
Robotiq Gripper 2F-140 and Gripper 2F-85
- These grippers feature versatile surfaces for picking up objects made from different types of textures
- The grippers adapt to the shape of the objects thanks to the underactuated joints that they contain
- Users are able to limit the maximum current applied to each gripper motor for maximum control
- The grippers are suitable for picking up items of different shapes and textures, including soft objects and round objects, the Gripper 2F-140 is also suitable for manipulation of larger objects.
- The patented finger design enables both internal and external parallel gripping, as well as a unique encompassing grip mode
Robotiq 2F-140 Gripper: the gripper includes parallel mechanism unlocking pins.
The 2F-140 Gripper has a larger contact surface on the fingertips, and that the stroke is 140 mm.
 Robotiq 2F-85 Gripper: the 2-fingered adaptive gripper also includes parallel mechanism unlocking pins.
Robotiq 2F-85 Gripper: the 2-fingered adaptive gripper also includes parallel mechanism unlocking pins.
The 2F-85 Gripper is suitable for grasping smaller objects and the stroke is 85 mm.
 Find out more about the Robotiq Grippers here.
Find out more about the Robotiq Grippers here.
PAL Robotics Parallel Gripper
- The Parallel Gripper is the default gripper option included with the purchase of a TIAGo robot
- The Parallel Gripper has 2 DoF (Degrees of Freedom), each one controlling one of the fingers independently
- The gripper also has an optional endoscopic gripper camera
- This gripper is precise due to being less complex, it’s also possible to know the current of each of the joints, and the gripper is able to manipulate heavier objects.
 PAL Robotics 5-fingered Hand
PAL Robotics 5-fingered Hand
- The 5-fingered Hand is a versatile and robust hand for grasping and Human-robot Interaction that was developed by PAL Robotics with contributions from QBrobotics
- The 5-fingered Hand has 19 DoF (Degrees of Freedom) of which 3 are actuated
- The hand has three motors that control the thumb, index finger, and remaining fingers independently
- This hand is designed specifically to grasp complex-shaped objects and less heavy objects.
 Creating your own TIAGo and choosing end effectors
Creating your own TIAGo and choosing end effectors
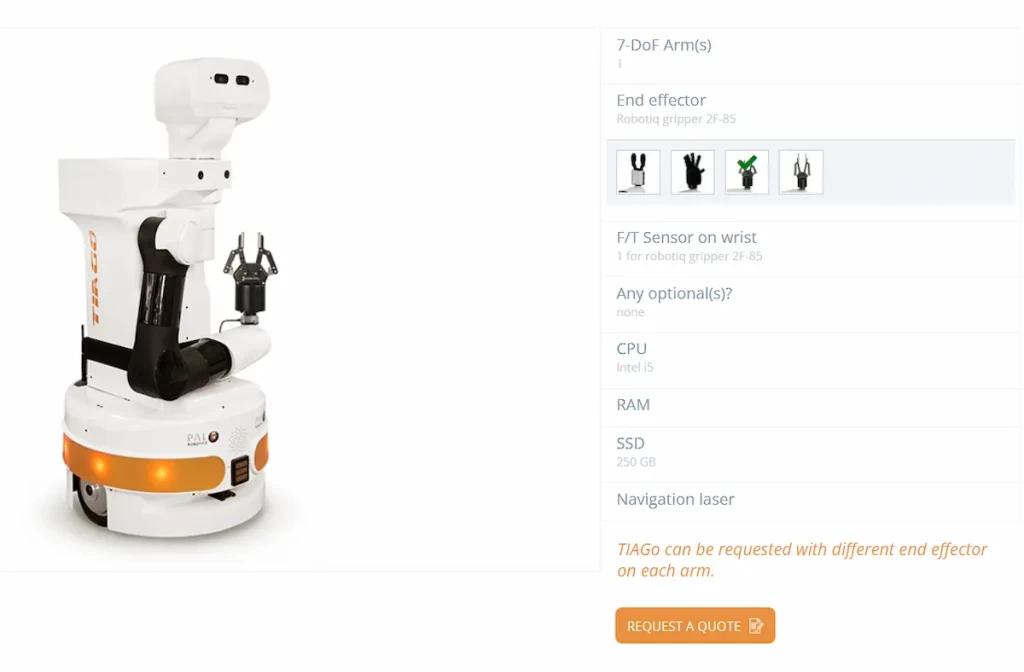
Using your website tool, “Create your own TIAGo robot” you will see the end-effector options we offer for the TIAGo robot. Here you can view the different end effectors available, as well as choosing other elements, such as the number of TIAGo arms, the CPU, and RAM. Take a look at this tool to create your own TIAGo.
Support using a variety of end effectors
It’s possible to integrate any end effectors that are compatible with the TIAGo robot (including your own end effectors), there is also the option of interchanging between different types of end effectors for different tasks. We provide you with a scheme of the mechanical interface for the integration of end effectors.
TIAGo has a CAN bus (Controller Area Network) for communication between the electronic components. The CAN bus is more robust than other buses like RS-485 as it includes the data link layer of the OSI model and handles better faults and collisions. We provide mechanical drawings of the wrist end tip so that customers are able to design the mechanical part to attach the end-effector to the wrist and use external cabling to connect to one of the ports provided in the laptop tray user panel.
The process for interchanging the end effectors in TIAGo is easy and fast, the 5-fingered Hand and Parallel Gripper for example use the same mounting connector and the same interface. There is also a ROS package that lets you integrate your customized end effector to the TIAGo robot very easily. Find out more here.
TIAGo robot including Whole-Body Control software and teleoperation
TIAGo robot combines perception, navigation, manipulation & Human-Robot Interaction skills out of the box and has a module github.com/…-robotics/custom_end_effectorlar design and can be configured based on customers’ needs. The arm has a large manipulation workspace, being able to reach the ground as well as high shelves. The robot is well suited for applications in the healthcare sector as well as in ambient assisted living and industry, and for many European research projects and robotics competitions, TIAGo is the platform of choice.
Whole-Body Control is a software package available with TIAGo that uses an optimization system that allows assigning different tasks based on predetermined priorities in order to avoid collisions with both the robot and its environment, as well as achieve position precision and admittance. In manipulating and grasping objects, whole-body control helps in preventing self-collisions.
TIAGo offers the option of remote teleoperation, which in particular in manipulation tasks includes a number of benefits. For example, teleoperation of TIAGo to do manipulation tasks allows the user even better control of how these particular manipulation tasks are performed, this is particularly important for an unstructured environment with objects that are unfamiliar to the robot. This method uses camera tracking, through the camera integrated into the robot’s head, and allows human operators to determine larger manipulation goals, at the same time leaving the details of positioning, manipulation, and grasping to the robot.
PAL Robotics created ROS Play Motion Builder to make it easy to create motions in TIAGo. Play Motion Builder tool is available on GitHub, with full documentation on wiki ROS also available. The tool makes building motions easier, as it’s not necessary to write the robot motions from scratch, and is very easy to use – as only around 15 minutes of training is needed to learn how to use it. This was created as part of The ROSIN (ROS-Industrial) series of EU research projects.
Robotics manipulation for use cases in EU research projects
We take part in a number of EU collaborative research projects which include manipulation tasks, for use cases in areas such as industry 4.0, agri-food and ambient assisted living, here are some examples.
Project CANOPIES
Project CANOPIES involves developing a novel collaborative human-robot paradigm in the field of precision agriculture for permanent crops. Here, farmworkers work together with teams of robots to perform harvesting or pruning in table-grape vineyards. In the project prototype, TIAGo++’s upper body will be used together with an adapted robotic base, and with additional sensors in each robot arm. We will also adapt the end-effectors for this project, to be ready for harvesting and pruning tasks.
Discover how PAL Robotics contributed to sustainable innovation in manufacturing through SIMBIOTS.
Project ALMI
Project ALMI, which we are project partners in, is looking at the development of assisted-living solutions, designed to help users at home and in care homes with motor or cognitive impairments in a wide range of tasks. The project includes a demonstrator with the TIAGo robot within an assisted living environment, where the robot will manipulate objects such as kitchen utensils and food items to help in meal preparation. Here force control will be implemented in a customized version of the arm for a high level of safety and effectiveness in manipulation tasks.
Project SIMBIOTS
The recent SIMBIOTS project facilitated the introduction of robotics in new industrial processes and applications thanks to the development of collaborative robots. In the project demo TIAGo robot cleaned and manipulated emblems that were part of a moving axis controller, helped by a human co-worker. We implemented admittance control here to measure the force detected by the sensor positioned on TIAGo’s wrist in order to adjust the position of the end-effector to clean the emblems effectively.
To learn about the capabilities of our research robot TIAGo, take a look at our blog and articles. If you would like to ask us more about TIAGo and which end effectors are most suitable for your research, do not hesitate to get in touch with us.