All PAL Robotics guides and tutorials to learn how to use to the fullest all our robots, tools, and applications.
ARI Wiki ROS simulator: remote control robot ARI
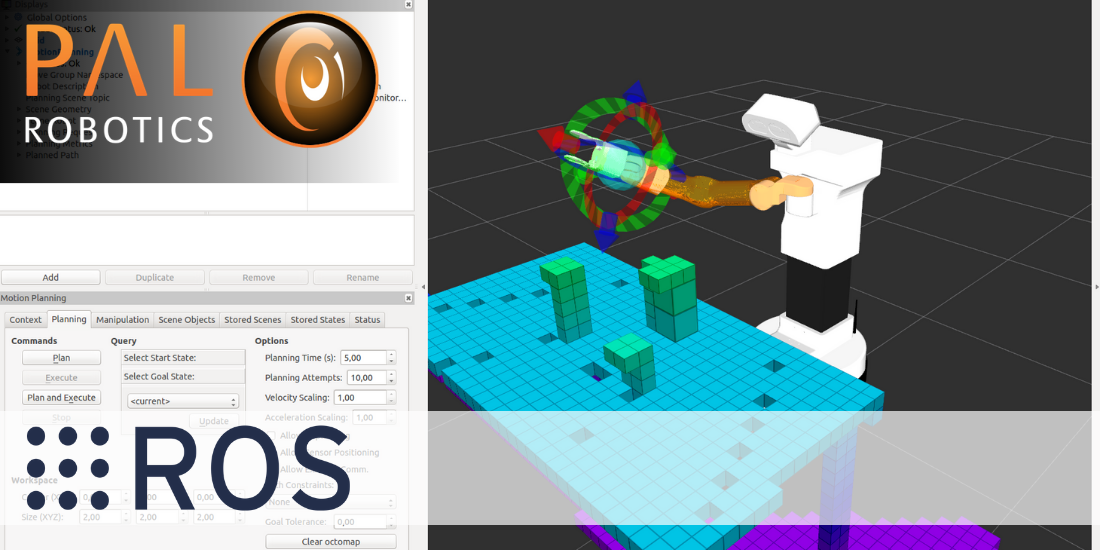
Remote controlling ARI with ROS simulator There are many different ways to control a robot, and the most widely used of these is remote control. In this ARI Wiki ROS