
The Advanced Platform Solo12 and Project Open DR
PAL Robotics in collaboration with the Open Dynamic Robot Initiative, is making the SOLO 12 Advanced Quadruped Platform available for purchase, with the mission of providing an accessible and affordable platform to further promote robotics learning for researchers and students.
The project OpenDR aims to meet the needs of the research community, with many institutions looking for a flexible research platform that’s lightweight, open source, and with a lower price entry point. SOLO enables organisations to have the option of a higher ratio of robots per student and empowers continuous learning and development for users through a worldwide SOLO community.
SOLO is a relatively easy-and-fast-to-assemble, modular quadruped robot that can be upgraded and modified, offering new possibilities in advanced research and development to teams on limited budgets, including those at teaching institutions, startups and SMEs, and smaller labs.
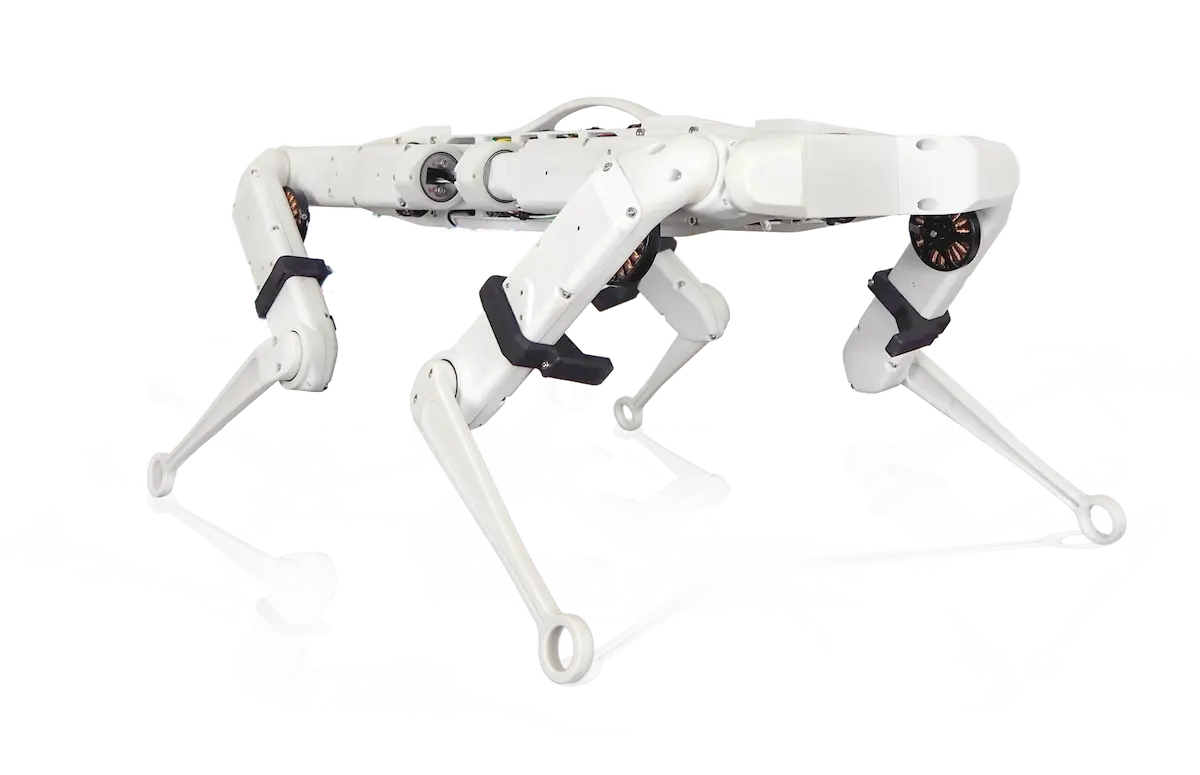
SOLO’s functionality, including torque-controlled motors and actuated joints, brings the robot significant capabilities. The SOLO 12 robot with 4 legs weighs just 2.5kg (providing a high power to weight ratio) and has a large range of motion made from 12 identical actuator modules and four lower legs with foot contact sensors.
Most of the components of SOLO can be individually 3D-printed, nevertheless, independent acquisition of all of these proper components can increase the manufacturing time and cost for the robot. Therefore, at PAL Robotics with the facilitation of SOLO 12, our goal is to centralize the manufacturing process and distribution of the product, offering ready assembled SOLO 12 robots for sale, as well as offering a KIT with all the components needed to build a SOLO robot.
The history of the SOLO project
The SOLO project was launched in 2016, under the aegis of the Open Dynamic Robot Initiative, by Ludovic Righetti, Senior Researcher, and Felix Grimminger, Investigator and Mechatronics Engineer at the Max-Planck-Institute for Intelligent Systems in Tübing en, Germany, as well as Alexander Badri-Spröwitz, Leader of the Dynamic Locomotion Research Group, also at the Max-Planck-Institute for Intelligent Systems. The project was launched in response to there being a low number of affordable advanced robotic platforms for learning. It was originally funded by Righetti’s starting grant and then by several Max Planck Institute for Intelligent Systems’ grassroots projects and a U.S. National Science Foundation grant.
This initial work is done in collaboration between the Motion Generation and Control Group, the Dynamic Locomotion Group, and the Robotics Central Scientific Facility at the Max-Planck Institute for Intelligent Systems, the Machines in Motion Laboratory at New York University‘s Tandon School of Engineering, and the Gepetto Team at the LAAS/CNRS.
PAL Robotics is passionate about innovation, for this reason, we facilitated the acquisition of SOLO 12 and we also plan to reinvest in the community for further development of open source projects.
SOLO 12 as a research platform
As a research platform, it is the aim that the SOLO 12 project will bring the research community a number of benefits:
- The robot is able to do dynamic tricks, such as jumping waist high or landing on its feet after toppling over.
- Projects in SOLO 12 are easy for other researchers to get involved in or contribute to since the platform is easily accessible. It’s also possible to add new features to the SOLO 12 robot.
- Complex algorithms can be rapidly tested on SOLO 12, simplifying and speeding up research.
- SOLO 12’s low weight makes the robot easy to work with and easy to transport to different locations for example for further developments.
- PAL Robotics has extensive experience in R&D (including research in areas such as navigation, perception and manipulation, software and hardware development) and is therefore able to advise on research developments with SOLO 12.
The robot makes research possible in such areas as: exploration of animal-based limb movement and movement over laboratory surfaces, gravel, soil, sand, mud, and other such terrains, reinforcement learning for complex and dynamic behaviours, including those that push performance to stress limits that would be too risky to attempt with high-cost platforms, very dynamic locomotion (including parkour-style behaviours), which very few robots can perform, manipulation of the environment (such as opening doors or pushing buttons), and integration of robots with advanced communications technology (such as 5G wireless).
The SOLO 12 platform at PAL Robotics
At PAL Robotics we are offering the ready-produced and ready-printed parts of the SOLO 12 robot together in one kit, as well as offering the ready assembled version of SOLO 12.
The SOLO 12 KIT contains all the necessary parts that users need to build their own SOLO 12. The KIT is also available to order in packs of 3 and 5. PAL Robotics also offers a wide range of accessories and components for the SOLO platform.
In the SOLO 12 KIT we include the following:
- SOLO 12 Quadruped 12DoF robot assembly x1
- SOLO 12 calibration tooling kit x1
- SOLO 12 master board programmer x1
- SOLO 12 micro driver programmer x1
- SOLO 12 bonding tooling kit x1
At this time, both the SOLO 12 KIT and the SOLO 12 assembled robot pack will have the same parts/products.
Join the SOLO community !
SOLO 12 includes a worldwide SOLO community, which is constantly expanding, to enable continuous community-driven development of the SOLO platform. Key to this is support for users of the platform. SOLO is supported by: Open Dynamic Robot Initiative, Github and the Discourse forum. Users benefit from support materials available on these platforms (including workshop and training materials), as well as discussion forums and the opportunity to share new developments, gaining a high level of visibility within the community.
To read more detail on the specifications of SOLO 12, take a look at this paper on modular robot architecture for legged locomotion.
To see a list of what’s included in the SOLO 12 KIT, visit the SOLO page on Github.
To learn about SOLO 12 and how to get your own platform, including the SOLO 12 FAQs, and if you would like to ask us more about the capabilities of SOLO 12 as a research platform, do not hesitate to check out our contact page.
If you found this article interesting, do not miss out all our other articles on our robots and on our research.