What is MoveIt!
There’s no need to have a robot to start developing applications for it! TIAGo, as all our robots, has the ROS simulation available for free and open to anyone willing to improve your code skills or even get started in robotics. A set of comprehensive tutorials in basic, intermediate and advanced levels are suitable both for those who want to improve their programming skills, and for people without any robotics’ knowledge (yet). Entering into robotics is easy with TIAGo and MoveIt!
Here are some useful resources that PAL Robotics put available for you:
- TIAGo’s Official ROS Wiki.
- Set of TIAGo tutorials in ROS and Gazebo.
Following the line of previous Tutorial 1 (Control) and Tutorial 2 (Navigation), in this third pack of open-source ROS Tutorials we will get to learn the basics about MoveIt!.
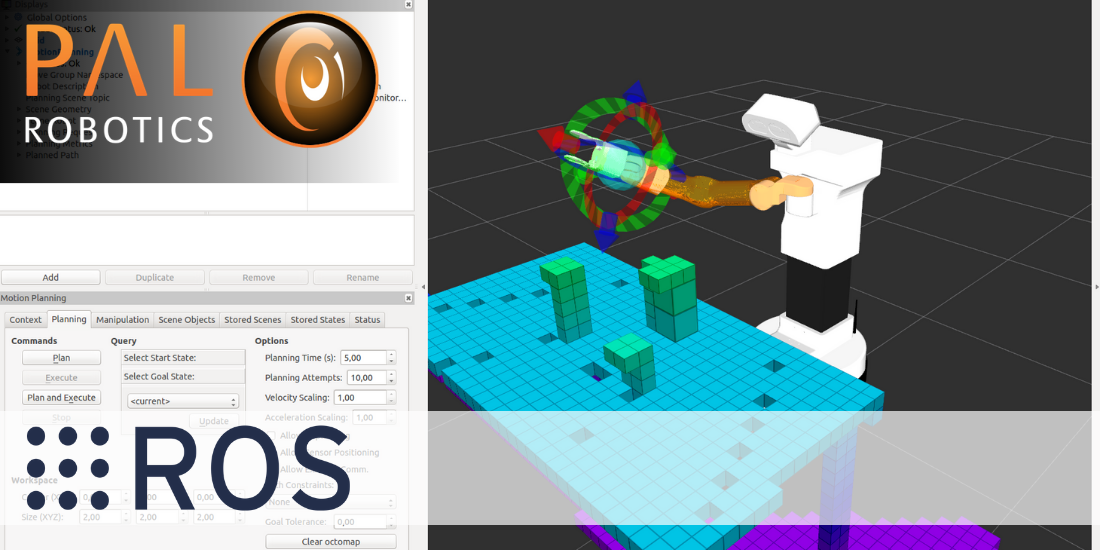
![]() MoveIt! is an easy-to-use ROS software for mobile manipulation that puts together the latest improvements in motion planning, manipulation, 3D perception, kinematics, control and navigation. It has become one of the most widely used platforms for developing advanced applications and for testing a robot’s design. MoveIt! is also open source, just like ROS is.
MoveIt! is an easy-to-use ROS software for mobile manipulation that puts together the latest improvements in motion planning, manipulation, 3D perception, kinematics, control and navigation. It has become one of the most widely used platforms for developing advanced applications and for testing a robot’s design. MoveIt! is also open source, just like ROS is.
How to use MoveIt! on TIAGo
Using MoveIt! is an easy way to take full advantage of TIAGo’s skills. Here you can find some detailed applications to start running MoveIt! in your TIAGo simulation:
- Planning in joint space: How to reach a given joint space configuration using motion planning based on MoveIt!. Torso-arm group of joints of TIAGo can be brought to any desired joint space configuration, ensuring joint limit avoidance and self-collisions.
- Planning in cartesian space: Use MoveIt! to plan a joint trajectory of the end-effector frame in order to reach a given pose in cartesian space. This other tutorial can also be run using the TRAC-IK solver rather than the one from KDL.
- Planning with Octomap demo: Use Octomap in MoveIt! to compute the collision checking with the environment around the robot during the motion planning of poses.
- Pick & Place demo: Tabletop pick & place demo using monocular model-based object reconstruction based on ArUco markers and the pick and place pipeline in MoveIt!.
Share your creations with us!
We will publish any cool development you are capable of. You can contact us directly through the form and don’t forget to take a look at our blog to keep updated on the latest trends in the world of robotics!