Strengthen your research with TIAGo
The purpose of PAL Robotics’ mobile manipulator TIAGo (standing for ‘Take It And Go’) is to help in robotics research while aiming at becoming a service robot in a near future. That’s why, in order to be accessible to everyone and easy to work with, the platform is open-source and 100% ROS compatible. TIAGo is ideal for any robotics research that requires perception abilities, navigation, objects grasping or Human-Robot Interaction.
TIAGo simulation model for Gazebo is available on this ROS Wiki. You can simply download and use it on your Gazebo desktop. Or even easier, you can also use the model at The Construct and skip the installation of ROS and Gazebo. With The Construct you can simulate TIAGo in Gazebo using only a web browser, with any type of computer (Linux, Mac, Windows) and without installing a thing.
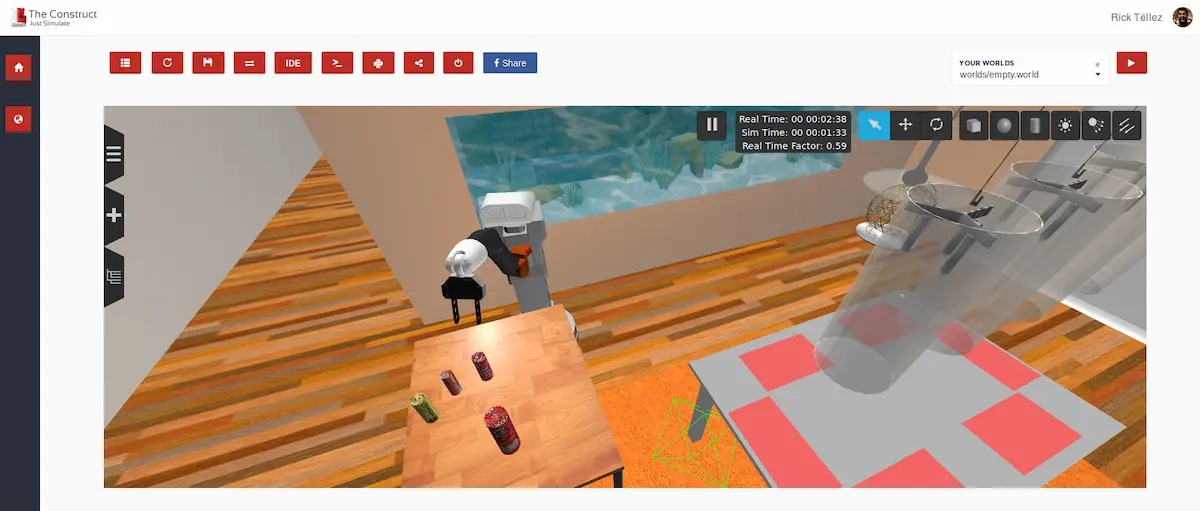
What follows are all the steps to easily manage TIAGo’s simulation that you can reproduce later with the real robot. Here we are showing the TIAGo simulation integrated in The Construct. This is just an example of how easy it is to simulate and implement actions and tasks to PAL Robotics’ TIAGo. Remember to share with us your TIAGo simulations – we want to see what are you able to make this robotic buddy do!
TIAGo’s mission: TIAGo comes out of the shelf with autonomous navigation. In this simulation, TIAGo will autonomously navigate, locate itself and map the room to arrive to the table through the easiest path. All this autonomous navigation will be in charge of its lasers, sonars, IMU and RGB-D camera. When getting there, TIAGo will detect a can, adapt its body lifting its torso if necessary and move its 7 DOF arm in order to grasp the object with its parallel gripper.
How to do it:
1. Choose where you are going to create a simulation for TIAGo. For the simulation, two options can be considered:
- Use a desktop installation of Gazebo in your computer.
- Simulate in the cloud with The Construct, they made this useful tutorial to illustrate how to get the most out of TIAGo in The Construct:
2. Download TIAGo’s simulation model for Gazebo (2.2 version), which is open-source. If you are not using The Construct, here is where you can find it available:
- GitHub: here you can also find the link to TIAGo’s ROS Wiki for further information.
3. Install the simulation files.
- If you are using your desktop installation of Gazebo, you need to create a catkin workspace and place the downloaded files from Github into the src directory of that catkin workspace.
- If you are using The Construct, you need to do nothing. Just upload the zip file to The Construct.
 4. Start simulating! Program the robot to perform whatever action you want it to do: from picking a can to follow a path, or bringing one object from one place to another.
4. Start simulating! Program the robot to perform whatever action you want it to do: from picking a can to follow a path, or bringing one object from one place to another.
5. Implement the simulation in your real TIAGo robot after having simulated the actions in the digital world. Test your simulation and verify it in the real world!
Any question?
If you have any problem when simulating with TIAGo, contact us to get any support you might need.
For more robotics news, don’t miss our blog on our work and research!